![]() Hemelscanner
Hemelscanner
(Verschenen in vakblad "Mikroniek" NVPT , febr.2002")
Een hemelscanner als indicator voor vrij uitzicht.
Door: ing. Reinier C. Ott
Algemeen:
Als engineer van de firma De Koningh b.v, een Arnhems bedrijf dat in 1902 is ontstaan als fabriek van landmeetkundige apparatuur, kon ik beschikken over relevante kennis en middelen die een oplossing konden geven voor het (voor mij in de letterlijke betekenis) astronomische probleem waar ik regelmatig tegenaan liep. Thans is De Koningh o.a. gespecialiseerd in het ontwerpen, vervaardigen en assembleren van fijnmechanische systemen en modulen. Hierbij heeft het bedrijf zijn fijnmechanisch karakter van weleer niet verloren, integendeel. De ontwikkeling van een hemelscanner is voortgevloeid uit een verlengstuk van mijn hobby astronomie. Ik wil U hier graag dit fijnmechanisch ontwerp als oplossing voor het astronomisch probleem tonen.
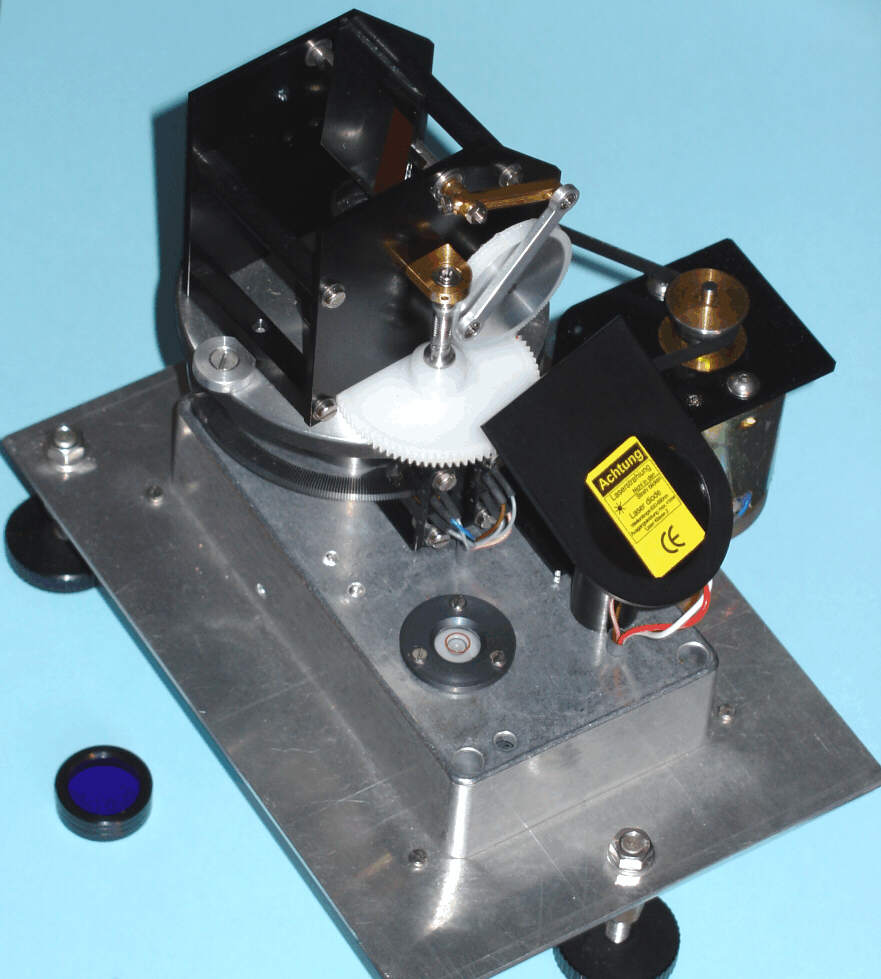
Fig.1 De hemelscanner (klik op de figuur voor technische uitvoering)
Waarom een hemelscanner en voor wie:
Inleiding:
Het zal voor iedereen duidelijk zijn dat de keuze van een goede waarnemingsplek essentieel is om goede (astronomische) waarnemingen aan de hemel te kunnen verrichten. Iedere amateur in het veld kent de problematiek dat het uitzicht op de hemel vaak belemmerd is. Heden ten dage, nu de stedelijke bebouwing overal in opmars is, wordt men vaak gedwongen de sterrenhemel waar te nemen vanuit de stad zelf of vanaf een verloren balkon op de 3e etage.
Gewapend met kompas/GPS, astronomische software en een telescoop zal moeten worden getracht het begeerde hemellichaam in beeld te krijgen. Overdag zijn er al voorbereidingen geweest om de telescoop op te stellen. Met behulp van de programmatuur kunnen op een eenvoudige PC de posities van de waar te nemen hemellichamen al met zeer hoge precisie worden voorspeld. Geen probleem dus. Maar wanneer men dan ’s nachts van het gehele berekende schouwspel wil genieten, blijkt dat een uit de kluiten gewassen boom of een flatgebouw aan de overkant, veel roet in het astronomische eten gooit.
Twee vakgebieden combineren:
Voor de schrijver van dit artikel was het een uitdaging om de berekende posities van de hemellichamen te combineren met het werkelijk bruikbare zicht op de hemel. Dit betekende dat de ‘horizon’ in kaart gebracht moest worden en vervolgens een softwarematige combinatie met voor dit doel geschikte astronomische programmatuur. Deze programmatuur moet aangeven of de gekozen locatie optimaal is voor het waarnemen van het betreffende hemellichaam.
Het in kaart brengen van de horizon en daarmee ook het vrije uitzicht op de hemel is het eenvoudigste te realiseren door middel van hoekmeting, dus door het opmeten van de windrichting (=azimut) en de hoogte van het object aan de hemel. Een waterpaslibel en een kompas dienen als referentie. Doorgaans beschrijven astronomen de positie van een hemellichaam in rechte klimming en declinatie. Dit is een eveneens op hoeken gebaseerd coördinatenstelsel, maar dit stelsel kan gelukkig worden omgerekend naar het gewenste (topocentrische) stelsel met de horizoncoördinaten azimut en hoogte.
Wat is er al verkrijgbaar voor dit doel:
Met enig vooronderzoek bleek dat voor het in kaart brengen van het hemelgewelf nauwelijks iets verkrijgbaar was dat voldoende handzaam was en zich bovendien eenvoudig met een PC liet verbinden, en zeker niet iets dat binnen een acceptabel budget bleef. Astronomische planetaria programmatuur zijn volop verkrijgbaar. Hierin wordt een ruime keuze geboden in de wereld van de PC’s, maar het koppelen van data op de gewenste wijze naar de juiste output is dan toch weer een probleem. Anderzijds ligt een belangrijk probleem in het opmeten van het gehele hemelgewelf zelf, van horizon naar horizon. Het gewenste instrument moest compact en draagbaar zijn en eenvoudig met een PC ( Laptop) via de standaard poorten te verbinden. Natuurlijk zijn er super groothoeklenzen, zoals fish-eye lenzen verkrijgbaar. Hiermee kunnen tezamen met voor dit doel geschikte camera’s 360º opnamen van de hemel worden gemaakt. Maar dergelijke lenzen zijn kostbaar omdat de prestaties van de optiek optimaal moeten zijn voor het waarnemen van de horizon zelf. En dat is nu net waar de informatie van de te scannen hemel het meest gedetailleerd moet zijn. Ofschoon er voor het gewenste doel geen extreme eisen aan de hoeveelheid beeldinformatie gesteld worden, het in kaart brengen van de hemel is tenslotte indicatief, blijven de in de handel verkrijgbare middelen kostbaar of schieten hun doel voorbij.
Hoe is het ontwerp van de hemelscanner tot stand gekomen:
Twee ontwerpen:
Het lag nu direct voor de hand dat er iets zelf ontwikkeld moest worden. Hiertoe hebben twee verschillende concepten gediend. Waarbij het principe van scannen al snel het voortouw kreeg. Dit was met name door de verwachte flexibiliteit om in een later stadium meer dimensies te kunnen toevoegen (zie verder op in dit artikel) Het 1e idee was om vanuit een bestaande web-cam uit te gaan, deze is immers goedkoop en een koppeling met een PC is ook eenvoudig (meestal reeds gerealiseerd). Echter een probleem is natuurlijk het maximale beeldveld van deze camera en de wijze waarop het vaak bescheiden aantal pixels wordt gerepresenteerd. De hierin gebruikelijke CCD’s beschikken doorgaans over een rechthoekige pixelmatrix, terwijl de omzetting naar polaire informatie (azimut en hoogte) hier juist gewenst is. Omzetten naar een polair beeld of andere informatie zal onherroepelijk weer afbreuk doen aan het beschikbare aantal pixels.
Echter een oplossing voor vergroten van het beeldveld (zonder gebruik van een dure fish-eye lens) bleek echter wel relatief eenvoudig. Het idee is om de (web-cam) camera zodanig verticaal op te stellen dat de optische as naar het zenit (= denkbeeldig punt aan de hemel recht boven de waarnemer) wijst. Boven deze camera wordt een bolle spiegel, bestaande uit een spiegelende halve bol, geplaatst. Zie figuur 2.
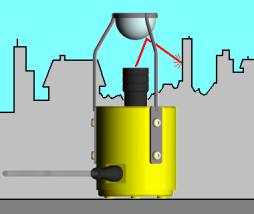
Fig.2 Combinatie camera met bolle spiegel
Het aldus verkregen beeld zal in het bijzonder informatie van de hemel aan horizon bevatten. Met een eenvoudige software routine kunnen de beeldfouten van de sferische spiegel worden omgerekend naar het gewenste beeld. Toch kleven aan dit ontwerp enkele nadelen. Met name is dat de spiegel zelf een belangrijk deel van de hemel wegneemt. Bovendien is een dergelijk bolle spiegel niet standaard verkrijgbaar, het opdampen van de spiegelende laag voor dit type spiegel is een lastig karwei.
Een spiegel als meetinstrument:
Ondanks de voordelen van een camera (in een enkele opname alle beeldinformatie binnen een fractie van een seconde) is gekozen voor het scannen. Het ontwerp bestaat uit een roterende en kantelende spiegel als meetinstrument (hieraan is de naam hemelscanner ontleent) voor het grafisch bepalen van het vrije uitzicht op het hemelgewelf. Het idee is nu dat de bewegingen van de spiegel geheel overeenkomen met de hemelstand in het gewenste coördinatenstelsel van azimut en hoogte.
Fig.3 Een roterende spiegel tast de hemel punt voor punt af
Technische beschrijving van het instrument:
Twee bewegingen:
De scanner bestaat uit een 1 motorig mechanisch aangedreven scankop. In het aangedreven gedeelte van het instrument is een spiegel ondergebracht die, middels een mechanisch gekoppelde constructie, twee bewegingen tegelijk uitvoert. De roterende beweging wordt direct door de motor gegenereerd. Aan de scankop zelf is een codeschijf aangebracht die de positiehoek meet door het tellen van pulsen. Deze positiehoek komt geheel overeen met het te meten azimut. In de roterende scankop is het mechanisme ondergebracht, waarmee de spiegel een 2e (kantelende) beweging uitvoert. Dit principe van de mechanische koppeling berust op een z.g epicyclische tandwiel overbrenging. Aan de vaste hoofdas van het instrument, hierin is tevens alle noodzakelijke optiek ondergebracht, bevindt zich een vast tandwiel (het zonnewiel). Een tweede tandwiel (het planetaire wiel) met een groter aantal tanden wikkelt zich tijdens het roteren van de scankop af ten opzichte van de stilstaande hoofdas. Met dit principe is het mogelijk om de tweede beweging, de kanteling van de spiegel, in te leiden. Doordat de rotatie van het afwikkelende tandwiel via een worm - wormwiel overbrenging wordt doorgekoppeld naar een uitgekiend stangenmechanisme is de kantelende beweging van de spiegel een feit geworden. Door deze gekoppelde mechanische beweging wordt spiraalsgewijs het hemelgewelf afgetast. De stand van de spiegel komt hierbij overeen met het te scannen object aan de hemel.
Stangenmechanisme:
Zoals vermeld vormt een 4 stangenmechanisme (zie fig.4) een belangrijke schakel in de mechanica van de scanner. Hierdoor wordt het mogelijk gemaakt dat de spiegel binnen bepaalde vastgestelde grenzen een kantelbeweging kan maken. Het aangedreven wormwiel maakt ongestoord een volledige omwenteling en vervolgens de spiegel een volledige kantelcyclus. Het stangenmechanisme heeft natuurlijk ten opzichte van het aangedreven wormwiel geen lineaire overbrenging naar de spiegel tot gevolg. Dit probleem wordt gemakkelijk ondervangen doordat de software achteraf de juiste stand van de spiegel terugrekent. Het stangenmechanisme is hierbij zodanig ontworpen dat de kanteling van de spiegel, gericht op de horizon, het traagst verloopt. Al doende wordt hierbij ook de meeste informatie van de te scannen horizon verkregen. (Dit is juist ook het deel van de hemel waarbij de scanner het meest op de proef wordt gesteld).
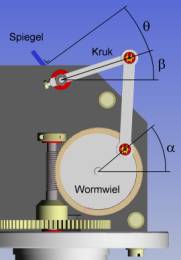
Figuur 4 Het 4 stangenmechanisme
De optiek:
Zoals vermeld vormt de spiegel het belangrijkste deel van het instrument. Het licht van de omgeving wordt via deze spiegel gereflecteerd naar de optiek dat zich in de (niet roterende) hoofdas van het instrument bevindt. Een lenzensysteem focusseert het licht op een pin-hole, een klein gaatje, waaronder zich een enkelvoudige foto PIN diode bevindt. De diameter van de pin-hole, de gevoeligheid van de gebruikte fotodiode en de gekozen optiek zijn zodanig op elkaar afgestemd dat de scanner voldoende scheidend vermogen krijgt. Hierdoor wordt ieder punt aan de hemel, afzonderlijk op helderheid, volgens de beschreven beweging van de spiegel gescand. (Hieraan ontleent het instrument de naam scanner)
Het gescande licht van de hemel wordt gefilterd op de blauwe component. Het gebruikte filter heeft een transmissie met een bandbreedte tussen 350nm en 450nm. Hiermee wordt vals licht (kunstlicht, reflecties e.d.) zoveel mogelijk tegengegaan. De fotodiode ontvangt dus van ieder punt sequentieel een hoeveelheid lichtequivalent en geeft via een hoog Ohmige versterker een elektrisch signaal af. Dit elektrische signaal wordt volgens een vooraf ingestelde drempel digitaal omgezet, en tezamen met de informatie van de codeschijf (actuele positie van de scanner) direct naar de computer gestuurd. (Zie fig. 5)
Fig.5 Digitaliseren van de informatie
Waterpassen en richten :
Natuurlijk behoeft het geen betoog dat de scanner ten opzichte van de hemel uitgelijnd dient te worden. Enerzijds geschiedt deze uitlijning door de scanner zelf en anderzijds moet deze op de juiste wijze worden opgesteld.
Het waterpas stellen van het instrument is geen probleem. Hiertoe dienen een dooslibel en een 3 tal stelvoeten. De scanner behoeft niet exact op het noorden zelf te worden uitgelijnd maar het is wel van belang om de deviatie δ hiervan te kennen.
Wanneer de scanner naar behoren is opgesteld en de deviatiehoek in de software is ingegeven, zoekt de scanner na het geven van een “start scan” signaal automatisch het nulpunt op van waaruit de eigelijke scan kan plaats vinden.
Voor deze nulpuntdetectie bezit de scanner een speciale inrichting: De spiegel wordt ingezet als LASER reflector. Hiertoe fungeert een ingebouwd LASER detectiesysteem als sensor. Tijdens de gehele scancyclus van de scanner zal iedere stand van de spiegel, door de beschreven gekoppelde kantelende en roterende beweging, uniek zijn.
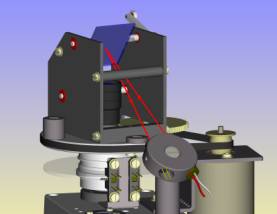
Fig 6. LASER nulpunt detectiesysteem
De refectiesensor is zodanig ontworpen dat er in de gehele cyclus slechts een moment is waarbij de laserstraal precies (gereflecteerd) de sensor van de detector treft. Nadat de gehele scancyclus is volbracht, stopt de aandrijfmotor en draait de scankop nog een paar ronden uit. Na het geven van een nieuw startsignaal (vanuit het stuurprogramma) zoekt de scanner als eerste weer het nulpunt op, waarna de nieuwe scan weer wordt gestart.
Een combinatie van mechanica, elektronica en data verwerking:
Een belangrijk deel van de scanner is de stuurelektronica en koppeling naar een PC waarop een speciaal hiervoor ontworpen programma draait. De stuurelektronica, die in het instrument zelf in ondergebracht, heeft tot taak om het scanproces te leiden: Hierin ligt de voornaamste taak om de gemeten lichtinformatie na versterking te digitaliseren en vervolgens te synchroniseren met de positie van de scankop. De beide gegenereerde signalen worden parallel aan elkaar via de RS232 poort naar de computer overgebracht. Er is gekozen voor de RS232 poort omdat deze vrijwel op iedere (Lap-top) computer beschikbaar is. Bovendien blijven het aantal data en stuurlijnen beperkt en ook de maximale scan snelheid bleek voldoende acceptabel om het 2kHz data signaal binnen te halen.
Zoals vermeld wordt de gescande lichtinformatie als 1 bit tezamen met een gesynchroniseerd eveneens 1 bit positie signaal naar de computer gestuurd. Nadat deze bitstroom met de licht - donker informatie van de hemel, geïndiceerd met de pulsen van de codeschijf in het geheugen van de computer zijn opgeslagen, rekent het programma deze informatie naar een afbeelding die op het beeldscherm kan worden weergegeven. (zie fig. 5)
Uit de pulsen van de codeschijf kunnen de horizon coördinaten direct worden terug gerekend.
Het azimut Az (in graden) als functie van het aantal pulsen wordt verkregen door:
|
Az = k. P + δ |
P |
= de ingelezen puls van de codeschijf |
|
|
k |
= constante; aantal pulsen per graad azimut |
|
|
δ |
= deviatiehoek t.o.v. het noorden |
De hoogte H (graden), dat eveneens aan het aantal pulsen P is gerelateerd, kan als volgt worden teruggerekend:
|
H = 2 ( 45º - β - θ) |
θ |
= constructie hoek tussen de spiegel en de kruk. |
|
|
β |
= variabele hoek van de kruk tijdens het scanproces. |
|
Met
|
|
|
|
β = f (α) |
|
De hoek van de krukarm als functie van de stand α van het wormwiel. (zie figuur fig.4) |
|
En vervolgens:
|
|
|
|
α = αo – k. P x i |
αo |
= De stand van het wormwiel op het moment van nulpunt detectie (P=0) αo is een constante. |
|
|
i |
= Lineaire (vaste) overbrengverhouding tandwiel en worm-wormwiel |
|
|
|
|
Alle hoeken zijn hierbij in graden uitgedrukt.
Software:
Uit de bovenstaande vergelijkingen, zijn een aantal parameters af te lezen. Zo wordt de hoek δ in het software programma gebruikt om de scanner, zoals reeds is beschreven, te richten op het noorden. Deze parameter kan ook worden gebruikt om de ingelezen scan achteraf nog te corrigeren.
De mechanische optimalisatie van de scanner, om maximaal effectief gebruik te maken van de a-lineairiteit van het stangenmechanisme, wordt bewerkstelligd door de combinatie van αo en θ. Deze beide parameters zijn afhankelijk van de stand van de spiegel op de as van de kruk. De omrekening van het stangenmechanisme zelf geschiedt doormiddel van een aantal goniometrische vergelijkingen.
Na omrekening bevat de verkregen data van de scanner overzichtelijk alle informatie over het vrije uitzicht op de hemel, vanaf de specifieke locatie waar het instrument is opgesteld. Het bijbehorende programma, dat draait onder Windows 98/2000, heeft nog een aantal bewerk en tekenfuncties aan boord. Hiermee kunnen eventuele correcties van de scan nog worden uitgevoerd. Het programma geeft tevens het percentage van de “vrije”hemel aan. Hiermee wordt een indicatie van de hoeveelheid daglicht gegeven.
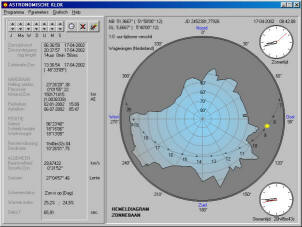
Fig.7 Het eindresultaat: De baan van de Zon vanuit een tuin in de stad Wageningen
Astronomische Klok:
Het stuurprogramma van de scanner onderhoudt een koppeling met een ander programma waarmee de standen van de hemellichamen in het betreffende hemeldeel worden berekend. De weergegeven scan die door de hemelscanner, na ongeveer 1 minuut scannen, op het beeldscherm wordt getoond, wordt dan doorgegeven naar een bijbehorende astronomische efemeriden programma.(Gr: ephemeris = dagboek) In een soort transparante layer worden zowel de gemaakte scan als de berekende posities van de hemellichamen overzichtelijk getoond. Het weergegeven diagram van figuur 7 is zo’n voorbeeld. Het diagram laat zich lezen als: Het azimut wordt in graden aan de buitenste cirkel gegeven (=horizon) terwijl de hoogte wordt weergegeven door de cirkels gerekend naar het centrum. Bij de baan van de Zon staan de uren vermeld. Het grijze gebied is het uitzicht belemmerde deel van de gescande hemel. Op 17 april zal er in het gegeven voorbeeld tussen 10:30 en 19:30 uur Zonlicht binnen vallen.
Het efemeriden programma onder de naam “Astronomische klok” is speciaal ontworpen om verschijnselen aan de hemel, op ieder moment en voor iedere plaats op Aarde, te kunnen weergeven en is bovendien geschikt om er allerlei applicaties aan te kunnen koppelen.
Kwaliteiten van de gemaakte scans:
Om ’s nachts gebruik te maken van de resultaten van de hemelscanner zal de scan overdag moeten worden uitgevoerd. Tijdens experimenten is gebleken dat het daglicht nogal wat fluctuaties in lichtintensiteit kent. Zo zijn er grote verschillen te constateren bij een strak blauw heldere lucht, waarbij de Zon hoog aan de hemel staat in tegenstelling tot een gedekte hemel op een sombere dag bij laagstaande Zon.
De eerste experimenten zijn gedaan bij droog weer onder een gedekte hemel waarbij de Zon relatief hoog aan de hemel stond. Bij deze situatie had de scanner ook de minste moeite om een goede scheiding te leggen tussen wat lucht is en wat horizon. De scans bleken goed reproduceerbaar naar alle delen van het hemelgewelf. In het zenit bleek de meting bleef enigszins onbetrouwbaar door de belemmering van de spiegel zelf. Maar gelukkig is dat deel van de hemel ook het minst interessant en kon met de opmaak functies van het programma gemakkelijk worden weggewerkt.
Overstraling en reflecties:
Moeilijker was de meting bij een fel schijnende Zon bij helder weer. Hoewel de scanner een (digitale) ingang bezit om de te meten lichtversterking in twee niveaus te kunnen regelen, bleek er toch nog een behoorlijke overstraling te ontstaan, vooral uit de richting van de Zon zelf. Het scanbeeld produceerde een beduidend groter ‘helder’ gebied dan eigenlijk mogelijk zou zijn. Bovendien zorgde een aantal reflecties, op o.a. muren en ruiten van gebouwen in de eerste instantie voor nogal wat verstoring in het geproduceerde scanbeeld. Door het plaatsen van extra blauwfilters voor de objectieflens van de scanner, konden zowel de overstraling als de storende reflecties in belangrijke mate worden teruggedrongen. Met de tekencorrectie functies van het programma zelf, was het ook mogelijk om bij dit weertype bruikbare scans te produceren. Hoewel de grote lichtgradiënt in de hemel hierbij wel het lastigste bleef.
Overstraling en reflectie traden in het geheel niet op bij een roodgekleurde Zon tijdens zonsopkomst of ondergang, of wanneer de hemel overdag door bewolking gedekt is.
Er kan in ieder geval worden geconcludeerd dat de scanner optimaal functioneert bij een transparante maar gedekte hemel, waarbij het Zonlicht diffuus wordt verstrooid.
Vage omgeving:
Het behoeft waarschijnlijk geen betoog dat de begrenzing tussen land en lucht te allen tijde scherp begrenst moet zijn. Maar er zijn situaties waarbij dit wat anders ligt. Zo vormen bomen die hun bladeren geheel of gedeelte hebben verloren een min of meer gespikkeld gebied in de weergegeven scan. Voor astronomische waarnemingen wordt een dergelijk gebied beschouwd als onbruikbaar. Met de corrigeerfuncties van het programma kan dit als zodanig worden aangegeven.
Wat kan er nog worden verbeterd:
Zoals is vermeld, kent het hemellicht nogal wat variaties in lichtintensiteit. Zo bleek het aanvankelijk ook moeilijk om vooraf en inschatting te maken welke versterking en (blauw) filter nodig zou zijn voor een optimale scan. Hoewel ervaring vaak een belangrijke grootheid is zou een tabel, afhankelijk van het gemeten licht door een belichtingsmeter uit de fotografie, nuttig kunnen zijn. Tevens wordt gedacht om deze belichtingsmeter in de scanner zelf te integreren, zodoende zou voorafgaande aan de scan de lichtinstelling automatische kunnen worden geoptimaliseerd.
Feed-forward.
Een mogelijke interessante uitbreidingsmogelijkheid is het laten fluctueren van de lichtversterking tijdens de meetcyclus. De Zonpositie aan de hemel is tenslotte vooraf bekend in de computer.
Zo kan de hemelscanner de lichtversterking van tevoren versterken of juist dimmen voordat het betreffende punt aan de hemel wordt gescand. Zoiets is met een “gewone” camera moeilijk te realiseren. Hiermee is het mogelijk om vooraf overstralingen door de fel schijnende Zon overdag tegen te gaan, terwijl in de meer donkere delen van de hemel juist meer licht door de scanner kan worden toegelaten.
Technisch gezien dient het stuursignaal voor de lichtintensiteit op de scanner analoog te worden gemaakt en de software behoeft enige aanpassing. Vanuit het astronomische programma kan de positie van de Zon “real-time” worden doorgegeven aan het stuurprogramma van de scanner.
Portabiliteit:
Ofschoon de opzet is geweest om de hemelscanner als een compact instrument in het veld te kunnen gebruiken, kleven er op dit moment toch enkele nadelen aan. Zo wordt thans de scanner gevoed met een adapter die op het lichtnet wordt aangesloten, dat is natuurlijk onhandig in het veld. Het mooiste is natuurlijk om de scanner rechtstreeks uit de computer (Lap-top) te voeden. En technisch gezien zou dit goed mogelijk moeten zijn. Een nadeel is dat een Lap-Top zelden standaard een aansluiting heeft om randapparatuur direct te voeden.
Door de experimentele bouw van de besproken scanner, zou miniaturisatie nog verder kunnen worden doorgevoed. De scanner bezit thans afmetingen van ongeveer een flinke kokosnoot.
Mogelijke andere toepassingen van de scanner ?:
Doordat ook de Zon zelf een hemellichaam is dat past binnen het raamwerk waarbinnen de scanner is ontworpen, kan de mate van invallend daglicht voor ieder moment en iedere locatie inzichtelijk worden gemaakt. In een bestaande omgeving kan het maximaal aantal Zon uren per dag direct worden getoond, ook is hiervan een overzicht gedurende het hele jaar te maken. Dit gegeven zou mogelijk interessant kunnen zijn voor herinrichting voor o.a. tuinen en bebouwing.
Tegenwoordig bestaat er in de CAD wereld ontwerpprogrammatuur waarin de stand van de Zon wordt meegerekend, maar vaak is een CAD model niet voorhanden in een reeds bestaande situatie, en zeker niet waarbij begroeiing (bomen en beplanting) door de jaren een rol speelt bij het wegnemen van Zonlicht.
Concluderend:
Het vervaardigde exemplaar van de beschreven hemelscanner is een prototype. Ofschoon er nog het een en ander kan worden verbeterd, levert het instrument resultaten die met enige voorzichtigheid goed bruikbaar zijn. De beeldvorming vindt direct plaats uit het gemeten azimut en hoogte. Technisch biedt het scanprincipe meer mogelijkheden dan een camera om adequaat met grote lichtvariaties overdag aan de hemel om te kunnen gaan. Hierin liggen nog een aantal verbeteringen ten grondslag waarmee de scanner kan worden uitgevoerd.
Ofschoon ik niet weet of er een markt voor het beschreven instrument zal zijn, al dan niet met nodige aanpassing en verdere ontwikkelingen, bewijst het instrument voor mij in ieder geval een nuttige dienst.
Bronnen:
Bedrijven:
|
1 |
DE KONINGH BV |
Simon Stevinweg 48, 6827 BT ARNHEM |
|
|
|
2 |
OPTEL BV |
Kerkenbos 13-03, 6546 BG NIJMEGEN. |
Dr. Ir. T. Scholten |
|
Literatuur:
|
1 |
Astronomical algorithms |
J. Meeus |
ISBN 0-943396-35-2 |
Willmann-Bell |
|
2 |
Methods of orbit determination |
Dan Boulet |
ISBN 0-943396-34-4 |
Willmann-Bell |
|
3 |
Lunar Tables and programs |
Chapront |
ISBN 0-943396-33-6 |
Willmann-Bell |
Wageningen , 30 december 2001